커넥티드 자율 주행 차량(CAV)을 위한 준비된 프로토콜
커넥티드 자율 주행 차량(CAV) 통신을 위한 준비된 프로토콜로 수월간의 엔지니어링 및 조정 작업을 건너뛰세요.

Interested in the protocols?
Discover how the Open CAV Alliance is shaping the future of connected mobility.
프로토콜 모델
커넥티드 자율 주행 차량에 대한 통신 표준을 이해하세요.
차량이 서로 및 근처 인프라와 실시간으로 통신하여 더 나은 조율과 안전을 가능하게 합니다.
원격 측정, 원격 업데이트 및 보안 관리를 위해 차량을 서버에 연결합니다.
원활한 통합을 위해 플랫폼, 도시 및 서비스 제공업체 간의 데이터 공유를 표준화합니다.
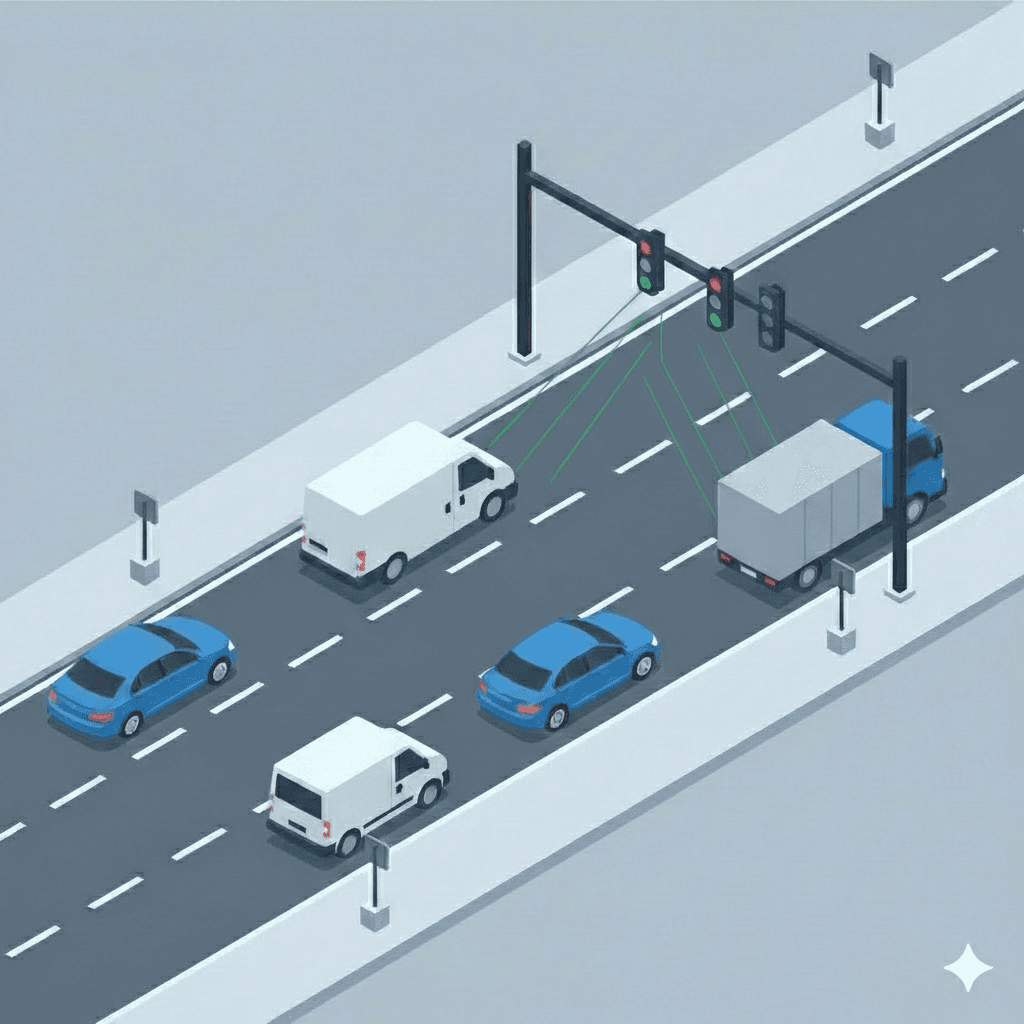
OCAVM: 개방형 커넥티드 자율 주행 차량 메쉬
차량 간 및 차량-인프라 통신 프로토콜
개방형 커넥티드 자율 주행 차량 메쉬(OCAVM)는 CAV 시스템을 위한 단거리 분산형 차량 간 통신 및 차량-인프라 통신을 가능하게 합니다. 차량들은 중앙 인프라에 의존하지 않고 실시간 안전, 조율 및 비상 신호를 교환하기 위해 로컬 메쉬 네트워크를 형성합니다.
OCAVM 기능
개방형 커넥티드 자율 주행 차량 서비스
장치 수준 관리 프로토콜
개방형 커넥티드 자율 주행 차량 서비스(OCAVS)는 차량을 백엔드 서버에 연결하여 원격 측정, 명령, 업데이트 및 진단을 제공합니다. 이 연합 지원 프로토콜은 차량과 관리 시스템 간의 보안 및 표준화된 통신을 가능하게 합니다.
OCAVS 기능

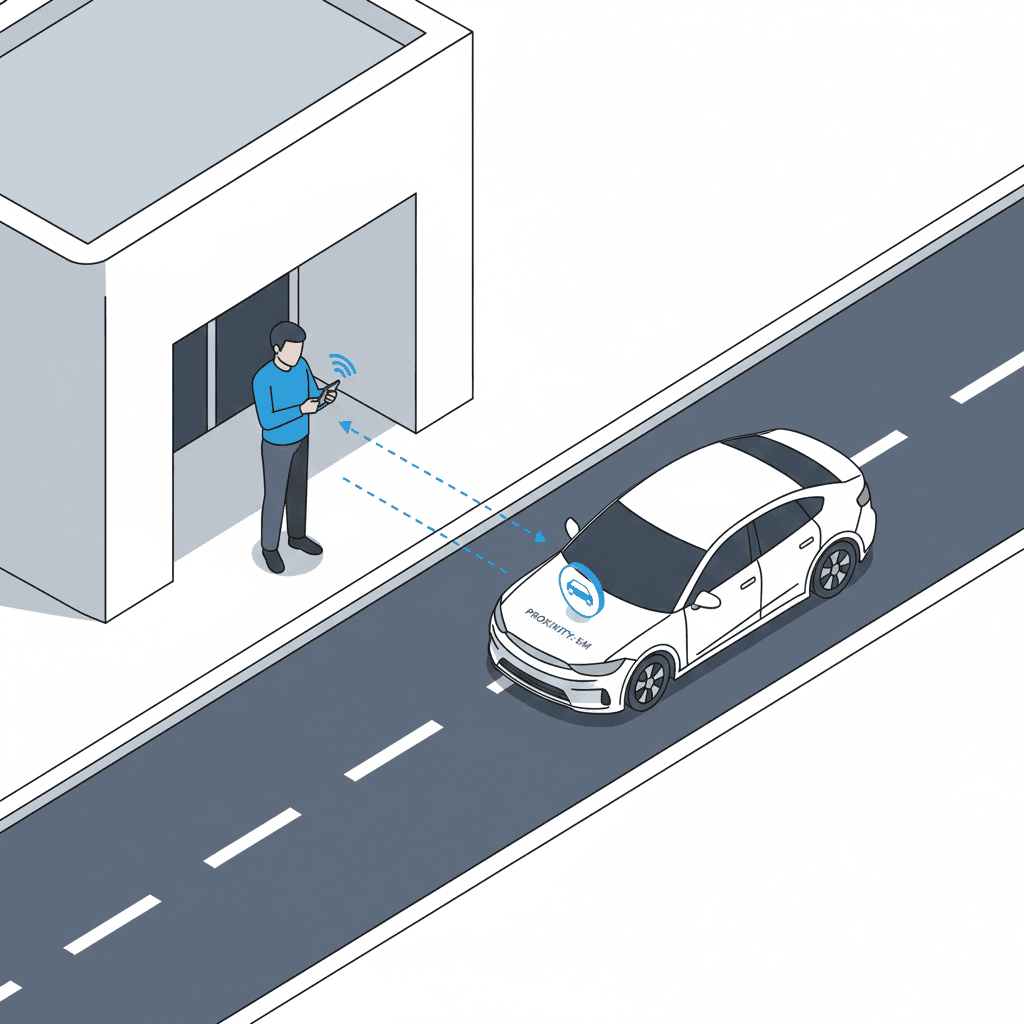
OCAVI: 개방형 커넥티드 자율 주행 차량 상호 운용성
생태계 상호 운용성 프로토콜
개방형 커넥티드 자율 주행 차량 상호 운용성(OCAVI)은 이동성 플랫폼, 도시 및 외부 서비스 제공업체를 연결합니다. 이 상호 운용성 표준은 여행 데이터, 예약, 가용성, 경로 지정 및 서비스 로밍 기능을 제공하여 다중 운영자 생태계를 가능하게 합니다.
OCAVI 기능
커넥티드 자율 주행 차량(CAV) 통신 프로토콜
이중 계층 통신 아키텍처
커넥티드 자율 주행 차량 통신 시스템의 기반.
개방형 커넥티드 자율 주행 차량 서비스.
차량을 백엔드 서버에 연결하여 원격 측정, 명령, 업데이트 및 진단을 제공합니다.
OCAVI: 개방형 커넥티드 자율 주행 차량 상호 운용성.
모빌리티 플랫폼, 도시 및 외부 서비스 제공업체를 연결합니다.
이중 계층 아키텍처.
장치-클라우드 및 플랫폼 간 통신 계층.
상호 운용성 중심.
플랫폼 간 호환성을 위해 설계된 연합 지원 프로토콜.
안전 및 표준.
안전과 표준화를 핵심 원칙으로 구축되었습니다.
개방형 생태계.
연합 지원을 통해 개방형 및 상호 운용 가능한 CAV 네트워크를 촉진합니다.
OCAVA Alliance 가입 혜택
멤버십은 업계 표준 개발에 있어 영향력, 조기 액세스 및 실질적인 협력을 제공합니다.
기술적 의사 결정 투표권
회원은 기술적 의사 결정에 직접적인 발언권을 가지며 프로토콜 진화와 전략적 방향에 영향을 미칩니다.
초안 사양 조기 액세스
초안 사양에 대해 미리 파악하여 더 넓은 출시 전에 제품을 준비하고 정렬하세요.
워킹 그룹 참여
기술 작업, 표준 개발 및 실제 상호 운용성 프로젝트에서 다른 회원들과 협력하십시오.
제안 제출 및 댓글 작성
개선 제안을 기여하고 기존 프로토콜에 대한 피드백을 제공하여 표준을 직접 형성하십시오.
기술 이사회(Technical Steering Committee) 자리
전략적 회원은 이사회에 참여하여 연합 로드맵과 기술적 우선순위를 안내할 수 있습니다.
상호 운용성 테스트 직접 참여
다양한 제조업체 및 플랫폼 간에 시스템이 원활하게 작동하는지 확인하는 실제 테스트에 참여하십시오.
FAQ
자주 묻는 질문