
Interested in the protocols?
Discover how the Open CAV Alliance is shaping the future of connected mobility.
プロトコルモデル
コネクテッド自動運転車両の通信標準を理解
車両が相互に通信し、近くのインフラとリアルタイムで通信して、より良い調整と安全性を実現
テレメトリー、リモートアップデート、安全な管理のために車両をサーバーに接続
プラットフォーム、都市、サービスプロバイダー間でのデータ共有を標準化し、シームレスな統合を実現
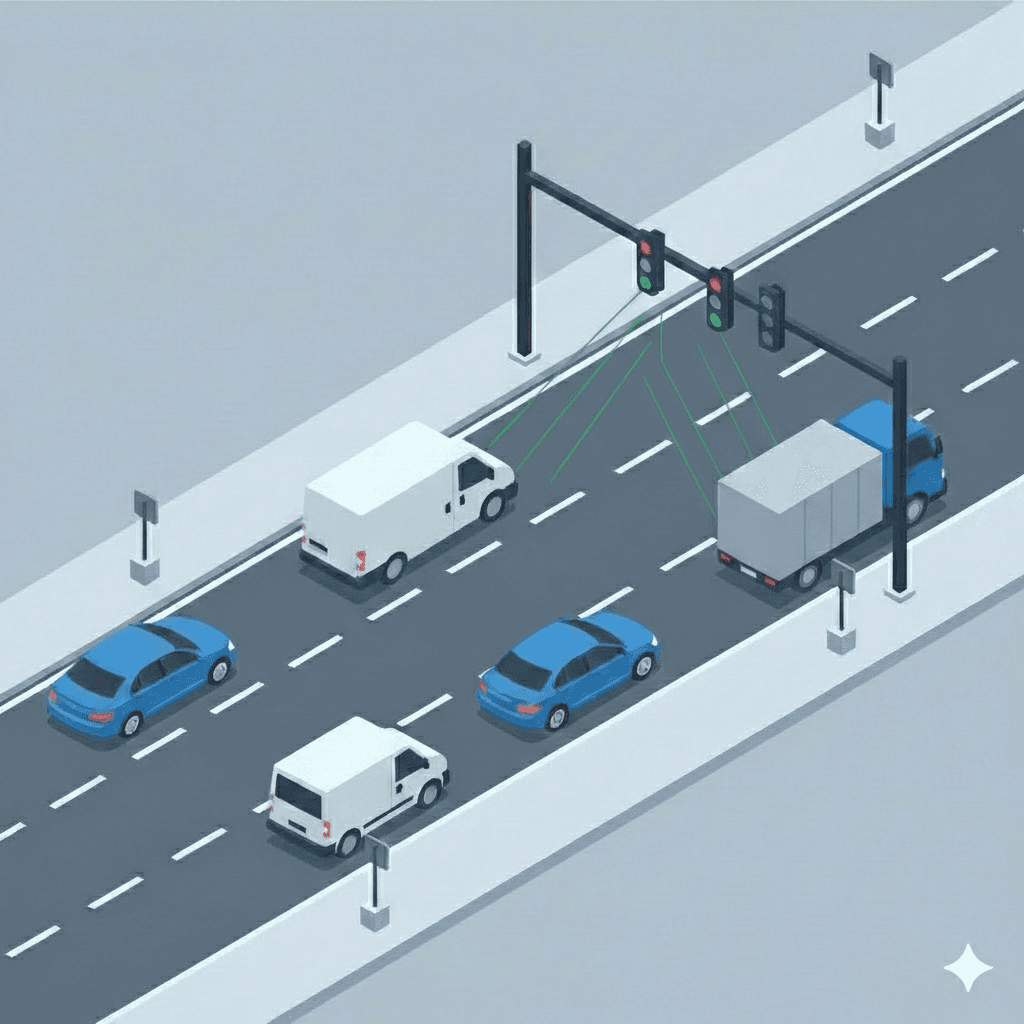
OCAVM:オープンコネクテッド自動運転車両メッシュ
車両間および車両-インフラ通信プロトコル
オープンコネクテッド自動運転車両メッシュ(OCAVM)は、CAVシステムのための短距離の分散型車両間通信および車両-インフラ通信を可能にします。車両は、中央インフラストラクチャに依存せずにリアルタイムの安全、調整、緊急信号を交換するローカルメッシュネットワークを形成します
OCAVM機能
オープンコネクテッド自動運転車両サービス
デバイスレベルの管理プロトコル
オープンコネクテッド自動運転車両サービス(OCAVS)は、車両をバックエンドサーバーに接続し、テレメトリー、コマンド、更新、診断を提供します。このアライアンスが支持するプロトコルは、車両とその管理システム間の安全で標準化された通信を可能にします
OCAVS機能

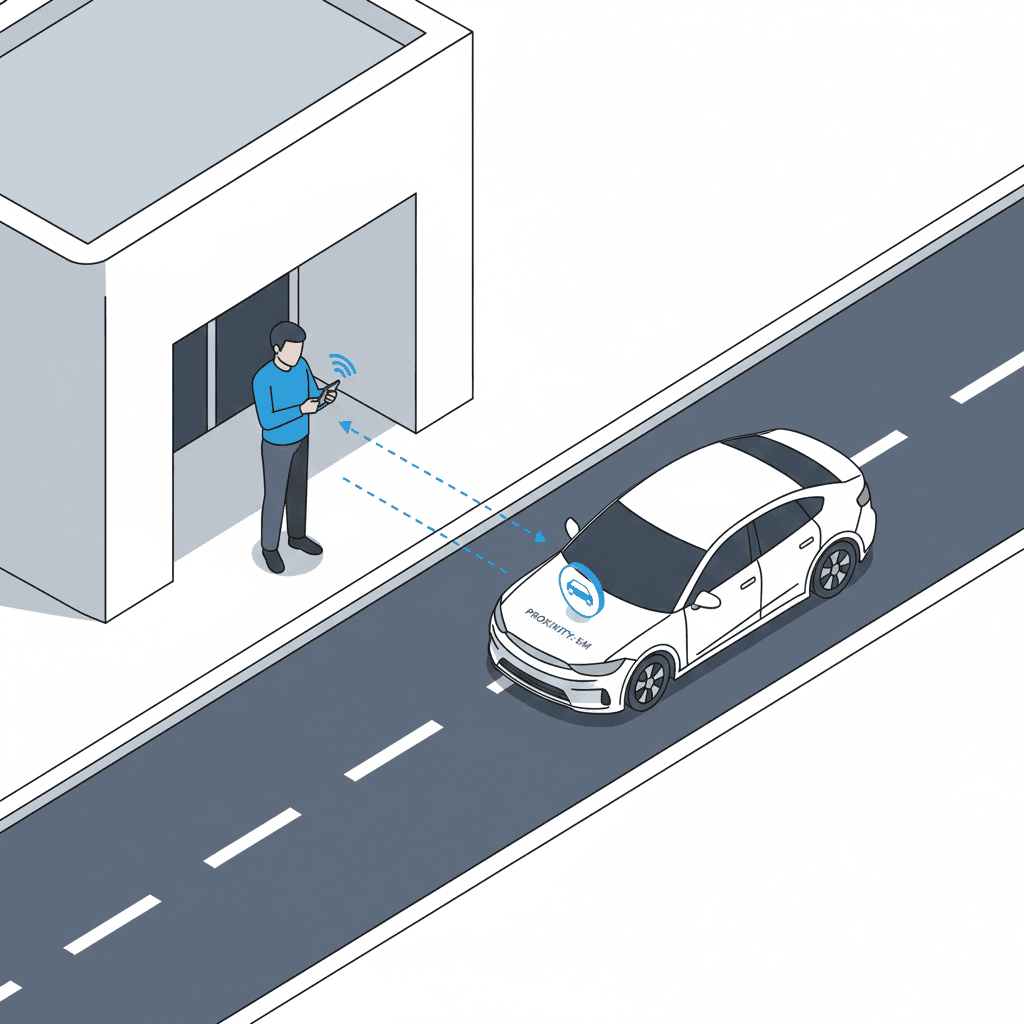
OCAVI:オープンコネクテッド自動運転車両相互運用性
エコシステム相互運用性プロトコル
オープンコネクテッド自動運転車両相互運用性(OCAVI)は、モビリティプラットフォーム、都市、外部サービスプロバイダーを接続します。この相互運用性標準は、旅行データ、予約、可用性、ルーティング、サービスローミング機能を提供することで、マルチオペレーターエコシステムを可能にします
OCAVI機能
コネクテッド・自動運転車両(CAV)通信プロトコル
2層通信アーキテクチャ
コネクテッド・自動運転車両通信システムの基盤
オープンコネクテッド自動運転車両サービス
車両をバックエンドサーバーに接続し、テレメトリー、コマンド、更新、診断を提供
OCAVI:オープンコネクテッド自動運転車両相互運用性
モビリティプラットフォーム、都市、外部サービスプロバイダーを接続
2層アーキテクチャ
デバイス-クラウドおよびプラットフォーム間通信レイヤー
相互運用性の焦点
クロスプラットフォーム互換性のために設計されたアライアンス支持プロトコル
安全性と標準
安全性と標準化を中核原則として構築
オープンエコシステム
アライアンス支持を通じてオープンで相互運用可能なCAVネットワークを促進
OCAVAアライアンスに参加する利点
メンバーシップは、業界標準の開発における影響力、早期アクセス、実践的な協力を提供します
技術的決定における投票権
メンバーは技術的決定に直接発言権を持ち、プロトコルの進化と戦略的方向性に影響を与えます
仕様草案への早期アクセス
広範なリリース前に製品を準備および調整するための仕様草案への早期可視性を取得
ワーキンググループへの参加
技術作業、標準開発、実際の相互運用性プロジェクトにおいて他のメンバーと協力
提案の提出とコメントの能力
改善提案を提供し、既存のプロトコルについてフィードバックを行い、標準を直接形成
技術運営委員会の議席
戦略的メンバーは運営委員会に参加し、アライアンスのロードマップと技術的優先事項を指導できます
相互運用性テストへの直接関与
システムが異なるメーカーやプラットフォーム間でシームレスに動作することを保証するための実践的テストに参加
よくある質問
よく寄せられる質問